Designing Interactive Materials
My interest in interactive materiality was sparked by TRIBLE, the analytical table. This project taught me how to use digital design and programming tools to make intelligent interactive products (T&R). This was the first time I had been confronted by the limitations of traditional materials in terms of functionality and interactivity, planting the seed of meta materials.
I have taken my understanding of craftmanship and focused it towards designing interactive materials. This competency came to fruition throughout my FBP, where I focused on soft robotics and programmable materials, but laid the groundwork for my future academic endeavors.
I developed this competency in designing interactive materials by leveraging the methodologies and attitudes required to design for shape change and soft robots (C&A) (T&R). Acquiring the technical skillset to fabricate the structure (T&R) and understanding the physics behind programming the shape change (MD&C).

Fully Functional Digital Twin

Phygital Data Visualizer
360 video of experience
The actual programming of the magnetic silicone structures was accomplished through understanding the physics behind the magnetic forces that interacted with the structures (MD&C). This taught me how magnetic field direction, internal dipole orientation, and magnetic torque all could be leveraged and visualized to predict movement in the magnetic silicone structures. Combining this knowledge with the operation of the impulse magnetizer allowed me to control the programming of the magnetic silicone and allowed me to design the behavior of a material (T&R). Having to learn all the aspects of magnetic soft robots has given me a framework to approach working with different materials and actuation methods.

Presenting to Cindy Kao at the Dutch Soft Robotics Symposium

Aesthetics of interaction prototype
This competency was developed the most through my FBP where I made programmable linked soft robots. The first attitude that I had to develop to explore different programming options was exploratory prototyping where I had to branch out to different materials (such as fabric) to test out behavior possibilities for the magnetic silicone (C&A). A general understanding of soft robot locomotion had to be developed to assist this prototyping process.
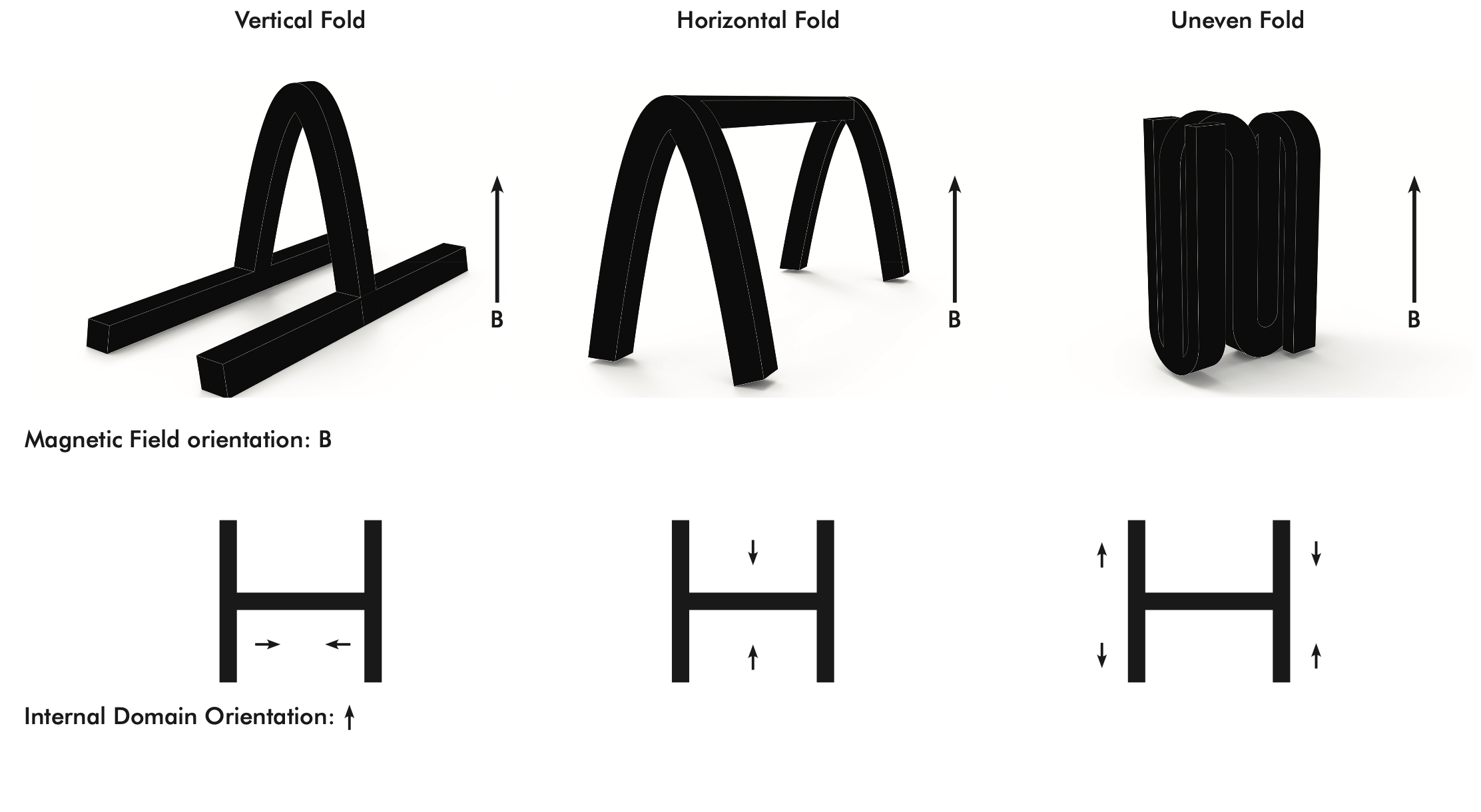
Programming Diagram: made for FBP
Once I had created a variety of robotic samples, I was able to go validate and explore user perspectives of the behaviors that I had programmed. I was able to present at the Dutch Soft Robotics Symposium where I was able to utilize my pitching and professional communication skills (B&E) to gather user perspectives from industry experts (U&S).
I took the courses Aesthetics of Interaction (report) and Design and Sensorial Form to strengthen my design perspective on materiality, interaction, and augmenting materials (C&A). In a field where engineering practices are most common, I believe these skills will and have allow me to explore untapped potential in interactive materials.